jeudi 2 mai 2019
samedi 20 avril 2019
Accueil
Sur ce blog sur les robots, vous allez pouvoir apprendre et découvrir de nouvelles choses et élargir vos connaissances.
les différents types de robots
Dans cet article, je vais vous présenter cinq grandes familles de robots.
il y aura un lien sur chaque image de cet article amenant à une vidéo se rapportant à chaque type de robot.
il y aura un lien sur chaque image de cet article amenant à une vidéo se rapportant à chaque type de robot.
Les robots agricoles:
exemple de robot de ce type:
PUMAgri-SITIA

Description:
PUMAgri vise à proposer aux exploitants agricoles une solution robotique polyvalente et innovante face aux enjeux de compétitivité, de protection de l’environnement ou encore de réduction des pénibilités du travail.
L’objectif de ce projet est de créer une machine intelligente d’une nouvelle génération qui sera autonome et capable de s’adapter à des conditions difficiles, avec plus de puissance que les robots actuels. PUMAgri contribuera à une amélioration de la qualité de vie des exploitants : diminution de la pénibilité des tâches agricoles et réduction significative des quantités d’herbicides utilisées.
Les robots artistiques:
exemple de robot de ce type:
HitchBOT




Description:
HitchBOT (de l'anglais « hitch » : « auto-stop », et « bot », abréviation de « robot ») est un robot auto-stoppeur créé par une équipe canadienne dans le cadre d'un projet artistique. Il n'a pas la possibilité de se mouvoir seul, mais, doté de modules de reconnaissance vocale et d'expression orale, il a la capacité de se faire comprendre dans le but d'être transporté vers une destination décidée par les créateurs. Durant ses périples, le robot ne reçoit aucune aide de la part de ceux-ci, qui le laissent seul dans les mains de personnes inconnues. L'équipe chargée de le suivre à distance, sans la moindre intervention physique, récolte seulement des informations sur sa position géographique, ainsi que la réaction, sur les réseaux sociaux, des personnes ayant pris en charge le robot.
Il traverse avec succès le Canada durant l'été 2014. En 2015, en Allemagne, une équipe de tournage le suit en permanence durant les quelques jours de son trajet. Plus tard dans la même année, le robot participe à des démonstrations culturelles aux Pays-Bas. Lors de sa quatrième sortie, organisée aux Etats-Unis, il est retrouvé démembré le 1er août 2015 à Philadelphie ( Pennsylvanie, Etats-Unis). Sa carcasse, rapatriée au Canada, est exposée aux musée des sciences et de la technologie au Canada.
Les robots sociaux:
exemple de robot de ce type:
AISoy1

Description:
AISoy1 (v5 en 2019) est un robot social programmable créé par l'entreprise espagnole AISoy Robotics. Il possède des fonctions cognitives et émotionnelles. Il utilise l'intelligence artificielle.
Sa plate-forme logicielle lui permet d'apprendre en interprétant les informations apportées par son réseau de capteurs. Il prend des décisions en suivant des critères logiques et affectifs.
Les robots compagnons:
exemple de robot de ce type:
Chippies Chipper
 Description:
Description:
Chipper est un chien robotique bleu amusant, qui adore jouer et faire rire.
Lorsque vous caressez la tête de vos CHiPPiES, vous obtenez différentes réactions, notamment des reniflements, des aboiements, des bisous de chiot et même un éternuement !
Utilisez la télécommande pour que Chipper marche, chante ou pourchasse sa queue.
Les CHiPPiES peuvent explorer votre chambre par eux-mêmes.
Protégez votre chambre contre les intrus à l'aide de leurs capteurs.
Les CHiPPiES chantent ensemble comme une meute.
À partir de 5 ans.
Les robots ludiques:
exemple de robot de ce type:
Jessiko
Description:
Jessiko est un robot poisson autonome de 22 cm développé par la société française Robotswim.
jeudi 21 mars 2019
Histoire de la robotique
Automates
2009 -Romeo: Romeo est une plateforme de recherche dont l'objectif est d'exploiter les solutions sur l'assistances au personnes âgées ou en perte d'autonomie. ce projet de recherche est piloté par SoftBank Robotics (anciènement aldebaran). 

Naissance du mot robot


Les trois lois de la robotique
1942 -Les Trois lois de la robotique: , formulées par l'écrivain de science-fiction Isaac Asimov, sont des règles auxquelles tous les robotspositroniques qui apparaissent dans ses romans doivent obéir..Exposées pour la première fois dans sa nouvelle Cercle vicieux (Runaround, 1942) mais annoncées dans quelques histoires plus anciennes, les lois sont :
un robot ne peut porter atteinte à un être humain, ni, en restant passif, permettre qu'un être humain soit exposé au danger ;
un robot doit obéir aux ordres qui lui sont donnés par un être humain, sauf si de tels ordres entrent en conflit avec la première loi;
un robot doit protéger son existence tant que cette protection n'entre pas en conflit avec la première ou la deuxième loi.
Naissance de la robotique (science)
au XVIIIe siècle - L'histoire de la robotique: s'inscrit dans celle, plus vaste, du développement et de la prolifération des machines, qui débute au XVIIIe siècle avec la Révolution industrielle. Elle commence donc avec l'automate. La différence fondamentale entre l'automate et ce que deviendra le robot au Axe siècle tient à ce que le premier obéit à un programme strictement préétabli, que ce soit de manière mécanique ou électrique, alors que le second dispose de capteurs et d'appareillages électroniques, de sorte que ses actions découlent de ses contacts avec son environnement, ce qui - à la différence de l'automate - le rend autonome, "intelligent", au point que l'on parlera plus tard d'intelligence artificielle.
Premier robot industrielle
1961 - Ce robot appelé Unimate: , est fabriqué par la société américaine Unimation est le premier robot industriel, il reprend la technologie développée pour les besoin du nucléaire. Il est vendu à partir de 1961 et 66 exemplaires seront pour la première fois installés sur des lignes d'assemblages de General Motors.

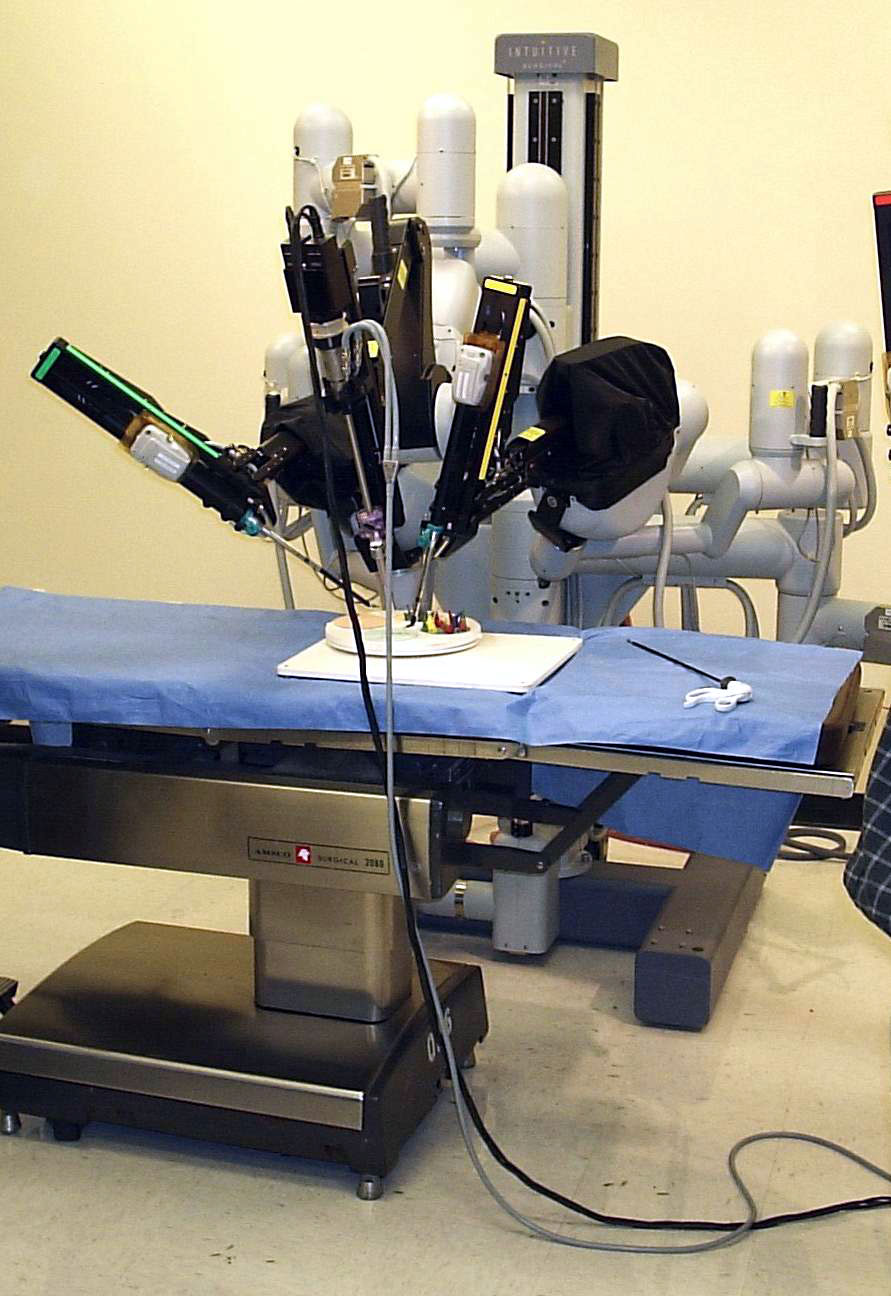
Un robot utilisé en médecine
12 Mars 1984 - Le premier robot chirurgical: au monde est le Arthrobot, développé et utilisé pour la première fois à en 1983. L'équipe à l'origine de ce robot était constituée du docteur James McEwen,ingénieur biomédical, Geof Auchinleck, un étudiant diplômé en génie physique de l'UBC, le docteur Brian Day, chirurgien, ainsi qu'un groupe d'étudiants en ingénierie. Le tout premier robot fut utilisé le 12 Mars 1984 lors d'une opération de chirurgie orthopédique au UBC Hospital de Vancouvert. Plus de 60 interventions d'arthroscopie furent réalisées la première année et en 1985 un documentaire sur les robots industriels deNational Geographique The Robotics Revolutionprésenta l'appareil.

Un robot utilisé dans l’espace
2003 - Opportunity: , Opportunity (« opportunité, occasion » en anglais), alias MER-B (Mars Exploration Rover - B), est la deuxième astromobile de la mission Mars Exploration Rover de l'agence spatiale américaine, la NASA, lancé vers la planète Mars en 2003.

reprises. En octobre 2017, le robot obtient la nationalité saoudienne, faisant de lui le premier androïde au monde à recevoir la citoyenneté d'un pays.
Un robot militaire
En 2006 - SGR-A1: , Samsung Techwin .(en). annonce la création d'un robot coûtant 200 000 $, équipé d'une mitrailleuse et d’un lanceur e grenade (optionnel) pour garder la zone coréenne démilitarisée à la frontière avec la Corée du nord.
le robot est capable de suivre plusieurs cibles simultanément. Il identifie des cibles jusqu’à quatre kilomètres en journée et moitié moins la nuit et peut identifier et éliminer une cible automatiquement au-delà de 3,2 km.
Le robot est également équipé d'un système de communication (microphone et haut-parleur), de façon que les mots de passe soient échangés avec les soldats humains. Si une personne donne le mauvais mot de passe, le robot peut « déclencher une alarme sonore ou faire feu sur la cible avec des balles en caoutchouc ou encore tirer avec une mitrailleuse Daewoo K3 ».

L'intelligence artificielle / IA
En 1950 - le test de Turing: Dans la droite ligne de la cybernétique, l’objectif de rendre les machines intelligentes a mené Alan Turing à définir en 1950 une méthode afin de tester la présence d’une conscience ou d’une intelligence au sein d’une machine. C’est le test de Turing, discuté de nos jours, mais certainement fondateur dans le domaine de l’intelligence artificielle
En 1963 - apparition des systèmes experts: , programmes ou outils capables de reproduire les capacités d’analyse et de raisonnement de spécialistes : démonstrations mathématiques, diagnostics, etc.
En 1970 - le programme SHRDLU: pouvait discuter et raisonner sur les éléments d’un monde prédéfini, contenant des cubes et des pyramides. L’environnement très simple de ce programme donna de faux espoirs quand à la faisabilité d’un programme intelligent dans des situations plus complexes de la réalité.
jeudi 14 mars 2019


sources d'informations
Vous trouverez ci-dessous l'enssemble des ressources que j'ai utiliser dans mes recherches.
FUTURA SCIENCES

Sur ce site, j'ai utilisé le dossier de l'histoire de la robotique.



{kind=link}
{kind=link}
Présentation
Je suis un élève de troisième du
Collège Saint Jaques La Forêt
de la Mothe-Achard en Vendée
Collège Saint Jaques La Forêt
de la Mothe-Achard en Vendée

Ce travail est réalisé dans le cadre de l'E.P.I
"E-ROBOT" qui est un travail pluridisciplinaire avec les matières suivantes:
"E-ROBOT" qui est un travail pluridisciplinaire avec les matières suivantes:
- Francais,
- Mathématiques,
- Technologie.

Inscription à :
Articles (Atom)